RHO-SteuerungenDie Roboter-Steuerungen gab es als fertigen Schaltschrank mit der Bezeichnung IQ200 oder als Einzelsystem mit der RHO-Grundbaugruppe und den Achsverstärkern. Einsatz fand die RHO-Steuerung in Handlingssystemen mit den SR6/SR8 Robotern von Bosch (SCARA). Sowie bei Portal- oder Handlingssystemen sowie Justierungsanwendungen Einsatz. Die Steuerung konnte bis zu 4 Achsen kontrollieren, wobei es ein 3-Achs-Grundsystem gab und zusätzlich eine Hilfsachse. Zusätzlich konnte in der RHO intern mit einer Soft-SPS oder als Profibus-DP Slave betrieben werden.EntwicklungsumgebungFür die RHO gab es verschiedene Tools zur Unterstützung bei der IB oder auch bei der Pro-grammerstellung unter ROPS. Die SPS wurde grundsätzlich mit WINSPS entwickelt. Zuletzt wurde für die Programmentwicklung das Tool ROPS4/Online eingesetzt mit dem die RHO-Steuerung programmiert werden konnte. Für die Antriebe wurde das Parametrier- und Inbe-triebnahme Tool DSS eingesetzt.EinsatzumgebungDie RHO - Steuerung konnte entweder für die Scara-Roboter, Handlingssysteme oder Mon-tage/Fixierungssysteme eingesetzt werden. Um für die verschiedene Aufgabe flexibel zu sein, konnte die RHO-Steuerung auch mit verschiedenen Erfassungssystemen wie einer Bilderfas-sung oder einem Messsystem für die Höhenerfassung gekoppelt werden. Auch gab es ver-schiedene Ausführungen der RHO mit integrierter SPS oder zur Ankopplung an ein Steuer-ungssystem über Profibus-DP. Ebenso konnten zum Beispiel unabhängige Hilsachse für zu-sätzliche Aufgaben, wie zum Beispiel ein Werkstück für ein Kamerasystem derhen, angepasst werden. Beispiel zu einer Roboteranwendung:
 RHO-Steuerungen
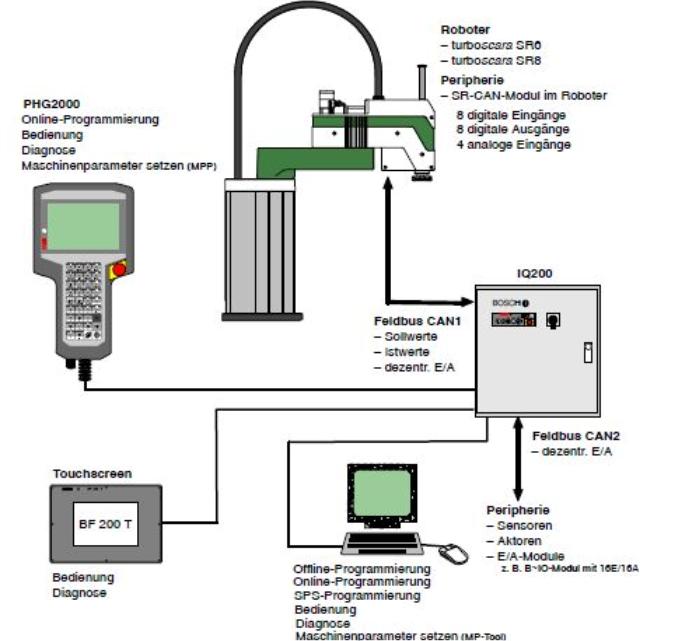
Die Roboter-Steuerungen gab es als fertigen Schaltschrank mit der Bezeichnung IQ200 oder
als Einzelsystem mit der RHO-Grundbaugruppe und den Achsverstärkern. Einsatz fand die
RHO-Steuerung in Handlingssystemen mit den SR6/SR8 Robotern von Bosch (SCARA).
Sowie bei Portal- oder Handlingssystemen sowie Justierungsanwendungen Einsatz. Die
Steuerung konnte bis zu 4 Achsen kontrollieren, wobei es ein 3-Achs-Grundsystem gab und
zusätzlich eine Hilfsachse. Zusätzlich konnte in der RHO intern mit einer Soft-SPS oder als
Profibus-DP Slave betrieben werden.
Entwicklungsumgebung
Für die RHO gab es verschiedene Tools zur Unterstützung bei der IB oder auch bei der Pro-
grammerstellung unter ROPS. Die SPS wurde grundsätzlich mit WINSPS entwickelt. Zuletzt
wurde für die Programmentwicklung das Tool ROPS4/Online eingesetzt mit dem die RHO-
Steuerung programmiert werden konnte. Für die Antriebe wurde das Parametrier- und Inbe-
triebnahme Tool DSS eingesetzt.
Einsatzumgebung
Die RHO - Steuerung konnte entweder für die Scara-Roboter, Handlingssysteme oder Mon-
tage/Fixierungssysteme eingesetzt werden. Um für die verschiedene Aufgabe flexibel zu sein,
konnte die RHO-Steuerung auch mit verschiedenen Erfassungssystemen wie einer Bilderfas-
sung oder einem Messsystem für die Höhenerfassung gekoppelt werden. Auch gab es ver-
schiedene Ausführungen der RHO mit integrierter SPS oder zur Ankopplung an ein Steuer-
ungssystem über Profibus-DP. Ebenso konnten zum Beispiel unabhängige Hilsachse für zu-
sätzliche Aufgaben, wie zum Beispiel ein Werkstück für ein Kamerasystem derhen, angepasst
werden. Beispiel zu einer Roboteranwendung:
RHO-Steuerungen
Die Roboter-Steuerungen gab es als fertigen Schaltschrank mit der Bezeichnung IQ200 oder
als Einzelsystem mit der RHO-Grundbaugruppe und den Achsverstärkern. Einsatz fand die
RHO-Steuerung in Handlingssystemen mit den SR6/SR8 Robotern von Bosch (SCARA).
Sowie bei Portal- oder Handlingssystemen sowie Justierungsanwendungen Einsatz. Die
Steuerung konnte bis zu 4 Achsen kontrollieren, wobei es ein 3-Achs-Grundsystem gab und
zusätzlich eine Hilfsachse. Zusätzlich konnte in der RHO intern mit einer Soft-SPS oder als
Profibus-DP Slave betrieben werden.
Entwicklungsumgebung
Für die RHO gab es verschiedene Tools zur Unterstützung bei der IB oder auch bei der Pro-
grammerstellung unter ROPS. Die SPS wurde grundsätzlich mit WINSPS entwickelt. Zuletzt
wurde für die Programmentwicklung das Tool ROPS4/Online eingesetzt mit dem die RHO-
Steuerung programmiert werden konnte. Für die Antriebe wurde das Parametrier- und Inbe-
triebnahme Tool DSS eingesetzt.
Einsatzumgebung
Die RHO - Steuerung konnte entweder für die Scara-Roboter, Handlingssysteme oder Mon-
tage/Fixierungssysteme eingesetzt werden. Um für die verschiedene Aufgabe flexibel zu sein,
konnte die RHO-Steuerung auch mit verschiedenen Erfassungssystemen wie einer Bilderfas-
sung oder einem Messsystem für die Höhenerfassung gekoppelt werden. Auch gab es ver-
schiedene Ausführungen der RHO mit integrierter SPS oder zur Ankopplung an ein Steuer-
ungssystem über Profibus-DP. Ebenso konnten zum Beispiel unabhängige Hilsachse für zu-
sätzliche Aufgaben, wie zum Beispiel ein Werkstück für ein Kamerasystem derhen, angepasst
werden. Beispiel zu einer Roboteranwendung: